Flexiv Primitives Manual
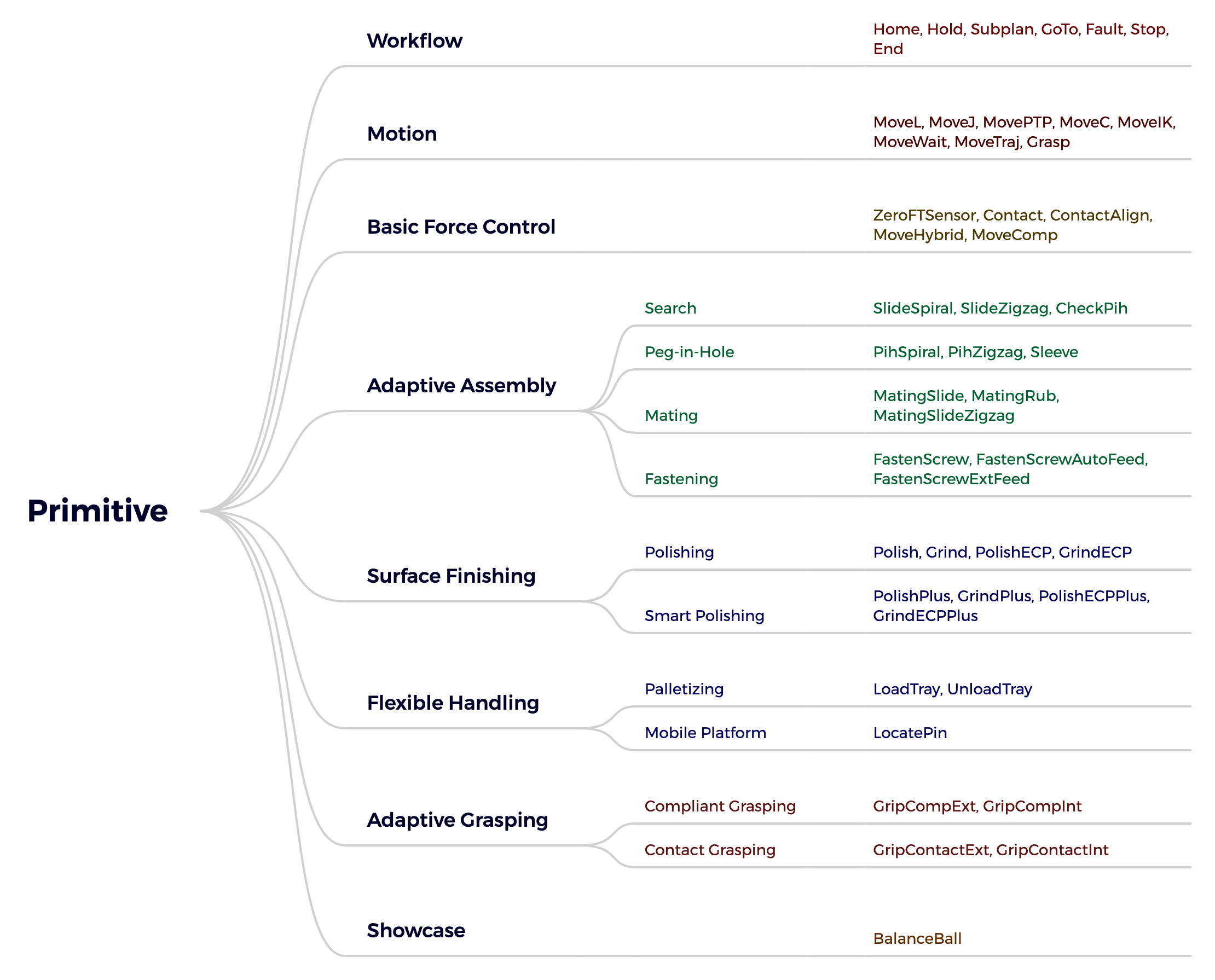
Primitives are robots’ actions/skills that can be used to operate the robot and tools. Users can use a sequence of primitives to define lower-level tasks, such as moving the TCP, applying a contact force, and/or performing higher-level tasks, such as polishing a surface or inserting a connector, etc. Primitives are also the basic building blocks of PLANs, which are typically used for running a complete application. Below is a list of primitive categories:
Important
- Make sure the following conditions are met for any primitive:
The robot is well-calibrated with kinematics calibration, dynamics calibration, and torque sensor offset.
The tool’s weight (if any) should be accurate enough with an error smaller than 100g.
The robot’s operation should not exceed joint position, velocity, and torque limit.
Waypoints (if any) are within the workspace (i.e. reachable pose).
During the motion, the robot should maintain a high manipulability (i.e. the robot is not too close to the singular configurations).